有手就行的ESP32-CAM监控教程
01、简介
? 基于esp32-cam的一个小东西。花了很多时间在网上找教程,发现基本都是使用的arduino实现的,但是使用arduino下载开发板就没成功过[流泪] [流泪];于是找到一个替代的工具 -- 简单,快捷(vscode)。
02、准备
-
开发环境安装
- 安装vscode
- vscode中安装platformio插件
-
材料
- esp32-cam开发板
- USB TO TTL 下载器
- 杜邦线一根
-
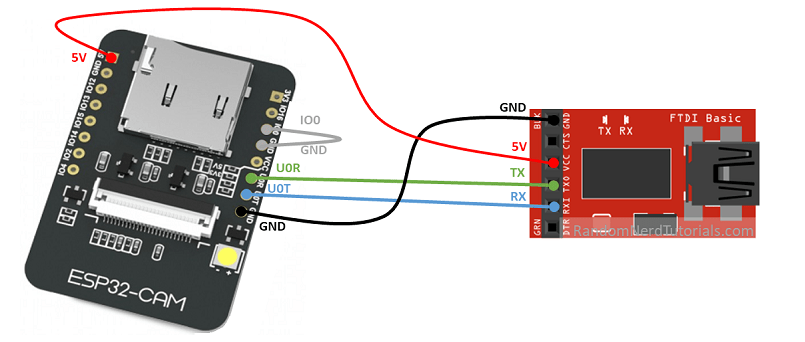
接线
03、配置项目
? 当platformio插件安装成功后,左侧出现一个蚂蚁头像。
- 创建项目选择 ->
AI Thinker ESP32-CAM板子; Framework ->Arduino - 下载
https://github.com/arkhipenko/esp32-cam-mjpeg开源项目 - 目录结构(修改)
- lib
- OV2640
- OV2640.cpp
- OV2640.h
- OV2640
- src
- camera_pins.h
- home_wifi_multi.h
- main.cpp
- platformio.ini
- lib
04、源代码
- OV2640.cpp
#include "OV2640.h"
#define TAG "OV2640"
// definitions appropriate for the ESP32-CAM devboard (and most clones)
camera_config_t esp32cam_config{
.pin_pwdn = -1, // FIXME: on the TTGO T-Journal I think this is GPIO 0
.pin_reset = 15,
.pin_xclk = 27,
.pin_sscb_sda = 25,
.pin_sscb_scl = 23,
.pin_d7 = 19,
.pin_d6 = 36,
.pin_d5 = 18,
.pin_d4 = 39,
.pin_d3 = 5,
.pin_d2 = 34,
.pin_d1 = 35,
.pin_d0 = 17,
.pin_vsync = 22,
.pin_href = 26,
.pin_pclk = 21,
.xclk_freq_hz = 20000000,
.ledc_timer = LEDC_TIMER_0,
.ledc_channel = LEDC_CHANNEL_0,
.pixel_format = PIXFORMAT_JPEG,
// .frame_size = FRAMESIZE_UXGA, // needs 234K of framebuffer space
// .frame_size = FRAMESIZE_SXGA, // needs 160K for framebuffer
// .frame_size = FRAMESIZE_XGA, // needs 96K or even smaller FRAMESIZE_SVGA - can work if using only 1 fb
.frame_size = FRAMESIZE_SVGA,
.jpeg_quality = 12, //0-63 lower numbers are higher quality
.fb_count = 2 // if more than one i2s runs in continous mode. Use only with jpeg
};
camera_config_t esp32cam_aithinker_config{
.pin_pwdn = 32,
.pin_reset = -1,
.pin_xclk = 0,
.pin_sscb_sda = 26,
.pin_sscb_scl = 27,
// Note: LED GPIO is apparently 4 not sure where that goes
// per https://github.com/donny681/ESP32_CAMERA_QR/blob/e4ef44549876457cd841f33a0892c82a71f35358/main/led.c
.pin_d7 = 35,
.pin_d6 = 34,
.pin_d5 = 39,
.pin_d4 = 36,
.pin_d3 = 21,
.pin_d2 = 19,
.pin_d1 = 18,
.pin_d0 = 5,
.pin_vsync = 25,
.pin_href = 23,
.pin_pclk = 22,
.xclk_freq_hz = 20000000,
.ledc_timer = LEDC_TIMER_1,
.ledc_channel = LEDC_CHANNEL_1,
.pixel_format = PIXFORMAT_JPEG,
// .frame_size = FRAMESIZE_UXGA, // needs 234K of framebuffer space
// .frame_size = FRAMESIZE_SXGA, // needs 160K for framebuffer
// .frame_size = FRAMESIZE_XGA, // needs 96K or even smaller FRAMESIZE_SVGA - can work if using only 1 fb
.frame_size = FRAMESIZE_SVGA,
.jpeg_quality = 12, //0-63 lower numbers are higher quality
.fb_count = 2 // if more than one i2s runs in continous mode. Use only with jpeg
};
camera_config_t esp32cam_ttgo_t_config{
.pin_pwdn = 26,
.pin_reset = -1,
.pin_xclk = 32,
.pin_sscb_sda = 13,
.pin_sscb_scl = 12,
.pin_d7 = 39,
.pin_d6 = 36,
.pin_d5 = 23,
.pin_d4 = 18,
.pin_d3 = 15,
.pin_d2 = 4,
.pin_d1 = 14,
.pin_d0 = 5,
.pin_vsync = 27,
.pin_href = 25,
.pin_pclk = 19,
.xclk_freq_hz = 20000000,
.ledc_timer = LEDC_TIMER_0,
.ledc_channel = LEDC_CHANNEL_0,
.pixel_format = PIXFORMAT_JPEG,
.frame_size = FRAMESIZE_SVGA,
.jpeg_quality = 12, //0-63 lower numbers are higher quality
.fb_count = 2 // if more than one i2s runs in continous mode. Use only with jpeg
};
void OV2640::run(void)
{
if (fb)
//return the frame buffer back to the driver for reuse
esp_camera_fb_return(fb);
fb = esp_camera_fb_get();
}
void OV2640::runIfNeeded(void)
{
if (!fb)
run();
}
int OV2640::getWidth(void)
{
runIfNeeded();
r